Based on the present optical diagram, the concept for telescope structure has been worked out that will be further modified/ changed based on the inputs and review from various teams.The telescope structure consist of following sub structure:
Elevation Structure
Azimuth Structure
Interface between the building and the azimuth structure
Elevation and azimuth rotating mechanism
Elevation Structure
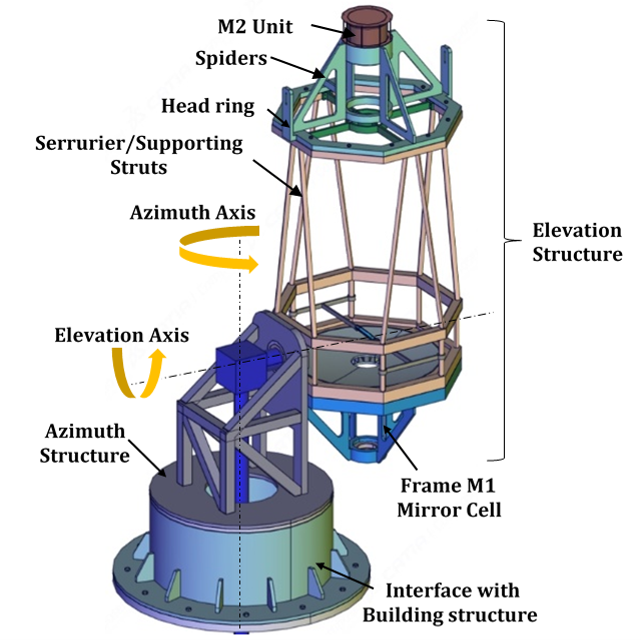
This is one of the main systems in the whole of NLST. The mechanical structure is mainly made out of long struts and frame work. This is necessary since the whole primary and secondary mirror should be well exposed to natural atmospheric wind flow during science observations. This ensures that the cold wind blowing over the optical elements prevent the mirror from excessive heating due to absorption of solar energy in visible and IR wavelengths.
Figure 2 Main structural parts of the telescope subsystem
Azimuth structure
This is a structure which is connected to the main elevation structure of the telescope on one side and at a right angular plane parallel to the ground, it interfaces with the azimuth axis bearing system of the telescope. The elevation axis is driven by a set of drive system having motor, gear reduction unit, bearing with housing etc. The azimuth axis is driven by another set of drive system which is integrated to the perpendicular plane which is parallel to the ground.
Interface between the building and the azimuth structure
This is a unit which provides connectivity between the azimuth structure and the building top at the observation floor. It ensures that the height of telescope elevation axis from ground is maintained to the required level. It also houses many parts of the azimuth drive system.
Elevation and azimuth rotating mechanisms
Elevation drive system
The telescope need to be driven about the elevation axis to get the required altitude pointing. It is proposed to be driven by a servo controlled motor and the bearings are proposed to be cross roller bearings. These bearings provide very high load carrying capacity, can be tuned to have zero backlash including low co-efficient of friction. Additionally these bearings will have gear teeth as part of inner or outer race which can be driven by the gear reduction unit integral with drive motor.
Azimuth drive system
The proposal for azimuth drive system is to use a fairly new type of bearing system (may be about 15 year old), known as R-Guide bearings. Many telescopes earlier were using hydrostatic bearings in order to get high stiffness with minimum bearing running noise (electrical as well as mechanical) transmission to the science data capture. With the advent of new mechanical technologies as well as advanced electrical noise filtering,now it is possible to achieve the same level , (or even better sometimes) of noise free bearing systems. Here, the bearing is similar to linear guide bearings, with the difference that linear is converted into a smooth curved radius during design and manufacturing.